name




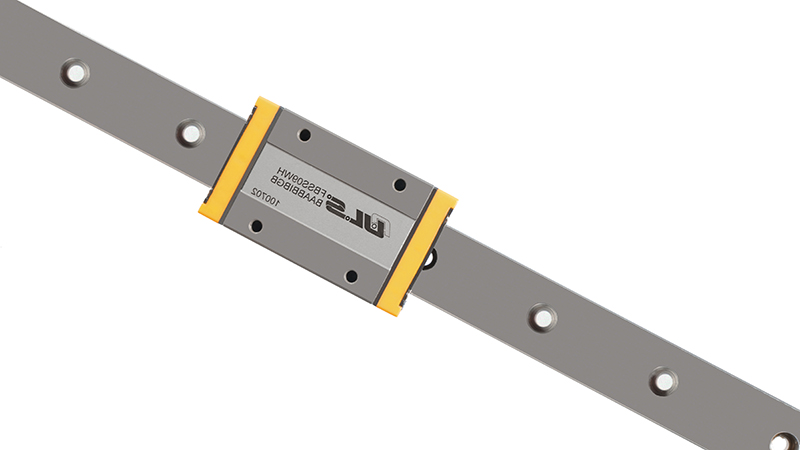
导轨
为客户提供微型直线导轨、标准直线导轨,目前已大量应用于医疗器械、3C电子、纺织服装、新能源、国防军工等机械自动化领域。


Flexifeeder
一拖一 标准柔性工作站
通用性强 / 产品换型快
结构简单,移动方便;外形美观,整洁
为客户提供微型直线导轨、标准直线导轨,目前已大量应用于医疗器械、3C电子、纺织服装、新能源、国防军工等机械自动化领域。
一拖一 标准柔性工作站
通用性强 / 产品换型快
结构简单,移动方便;外形美观,整洁





















?2021-2031 苏州PA视讯中国 自动化科技有限公司 版权所有



